
Now that the mechanical side of our Opti-BF20 upgrade is almost complete I'm trying to get all the bits and pieces together for the electronics upgrade too. Here I've made cables for the servos. Three 1.5mm^2 conductors (+, -, and protective earth) in the black wire carry power to the motor, and I use a 25-pin (10 of which are used) parallel printer-port cable (white) for the differential encoder. Since we're going to be using flood coolant I've used plastic tubes (grey) around the X and Y motor cables to keep them dry.
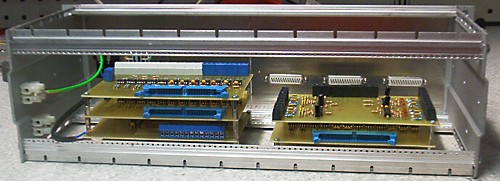
This is the 'breakout-box' for the m5i20. On the left the jogwheel card is on the bottom with two general purpose IO optoisolator cards on top. To the right the motion-control optoisolator on the botton and the differential encoder interface on top. The next job is to wire everything inside the box and start testing how all signals come through to HAL. I'll put together a pyVCP panel for testing everything.
One thought on “Servo electronics progress”