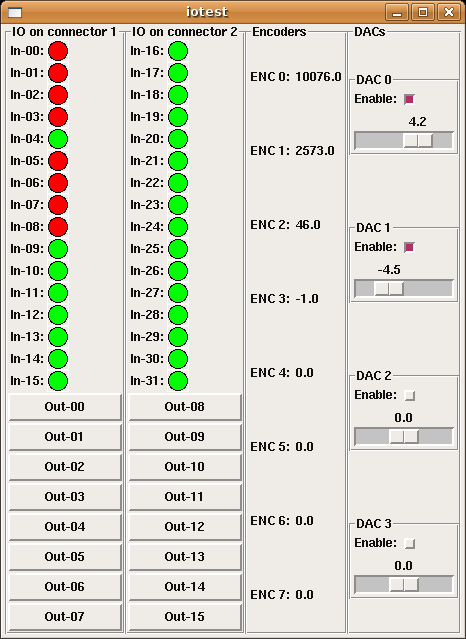
For testing the servo-drives and all the electronics I found this test-panel for the HOSTMOT-4 conifiguration of the m5i20 quite useful.
It uses an XML file (iotest.xml) to define the pyVCP panel layout, and then a HAL file (pyiotest.hal) to hook up the IO pins of the m5i20 to the panel. I'm also using a shell script (iotest.sh) to start the realtime environment and run pyvcp followed by the HAL file automatically.
Compare this to my earler effort with the old VCP. Now with many more widgets in pyVCP I have better control of the DACs etc.
might be good to have a zero button on the dacs to stop things if they get out of hand. Very nice job!
Hiya!
can i update the wiki with your new files?
tomp
Hi Tom P,
Yes, these scripts and the image are hereby released under the GPL, and you may add them to the EMC wiki if you want.
Anders
this is now on the EMC wiki, here:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?M5i20_Halvcp_Test_Panel
Anders,
I updated the emc wiki page,
and the link to my site has a comma in it,
should be a period 😉
thx
TomP
Hi Anders,
Nice web page!
I am trying to expand my Axis interface and came to a problem which you can solve maybe:
Is there a possibility to set the maximum value of a pyVCP scale from outside via a signal from HAL or a parameter?
-
Another question: when I open your tarball I find another tar file inside that my Archive manager cannot process (on LinuxMint 19).
I would be glad if you could help,
JC
Hello JC,
I don't think there was a maximum-value input for a pyVCP scale originally - but things may have changed.
The best place to ask is the linuxcnc forum I think https://forum.linuxcnc.org/
If you need to write a custom pyVCP widget it should not be that hard..
I don't think you need the tar.gz file (it may be broken on the linuxcnc wiki). The hal-file, xml-file, and optionally the sh-file to run it all is what is needed.