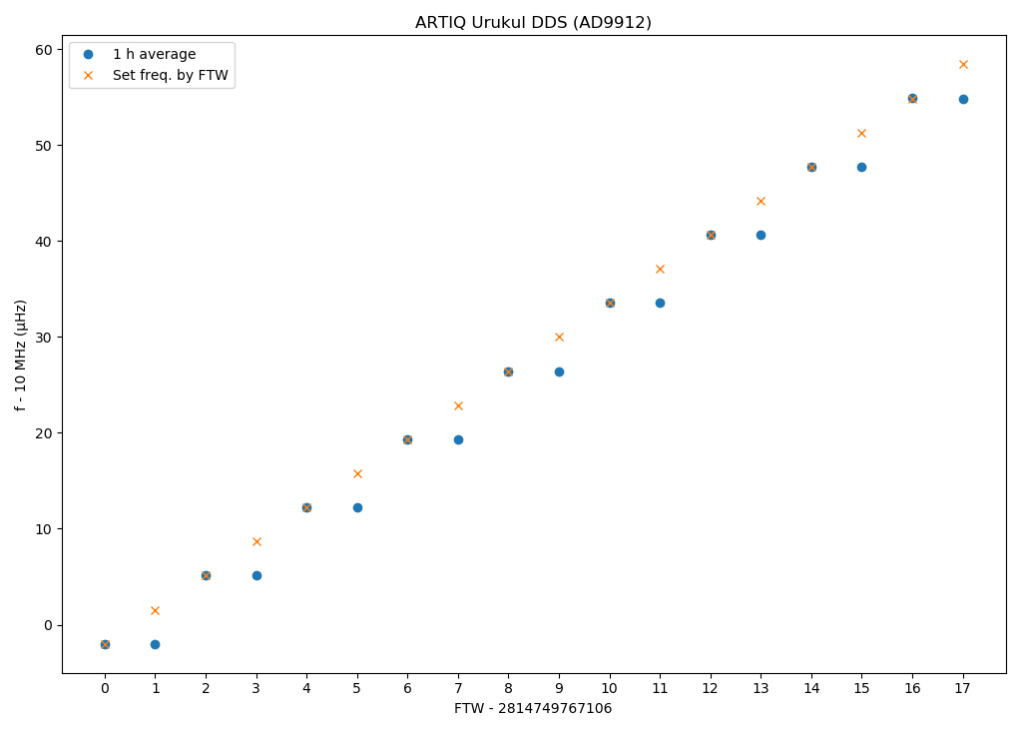
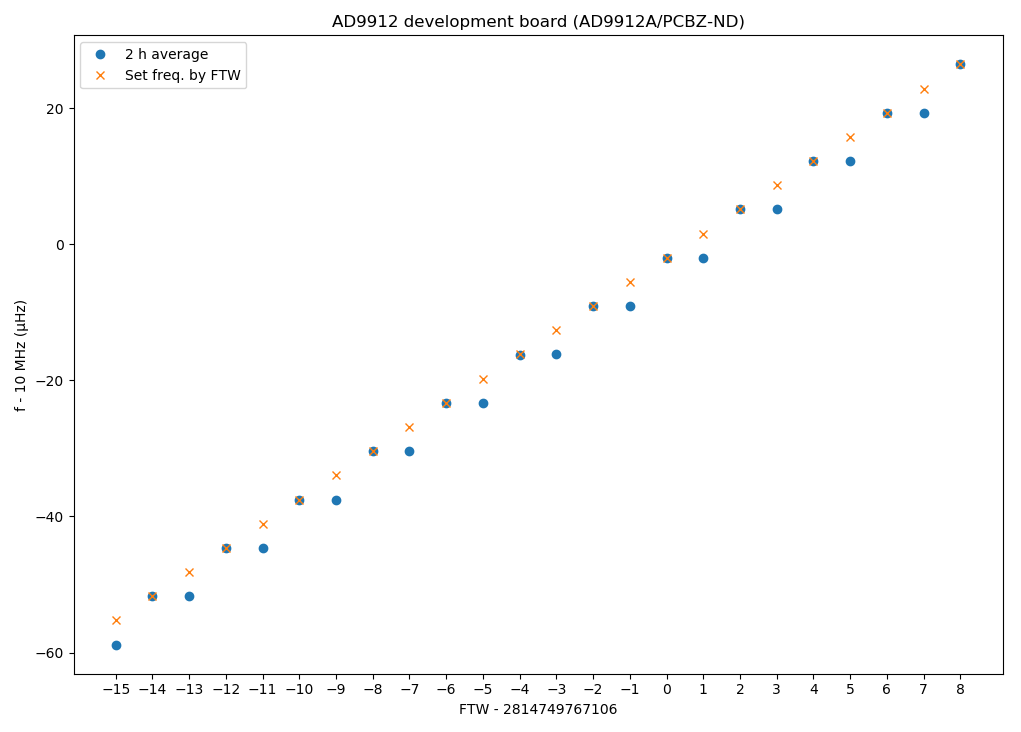
In both cases the output frequency corresponds to an even frequency tuning word (FTW) although we step the frequency by one LSB. In other words the LSB appears to be zero in all cases, even when we write an odd FTW with '1' as the LSB. Instead of the expected 3.55 uHz frequency resolution we see double-sized steps of 7.1 uHz.
The Urukul measurement was done with a Microsemi 3120A phase-meter and the dev-board was measured using a PICDIV 1PPS-divider followed by a Keysight 53230A time interval counter. The even FTW frequencies agree with the predicted frequency to much better than 0.1 uHz.
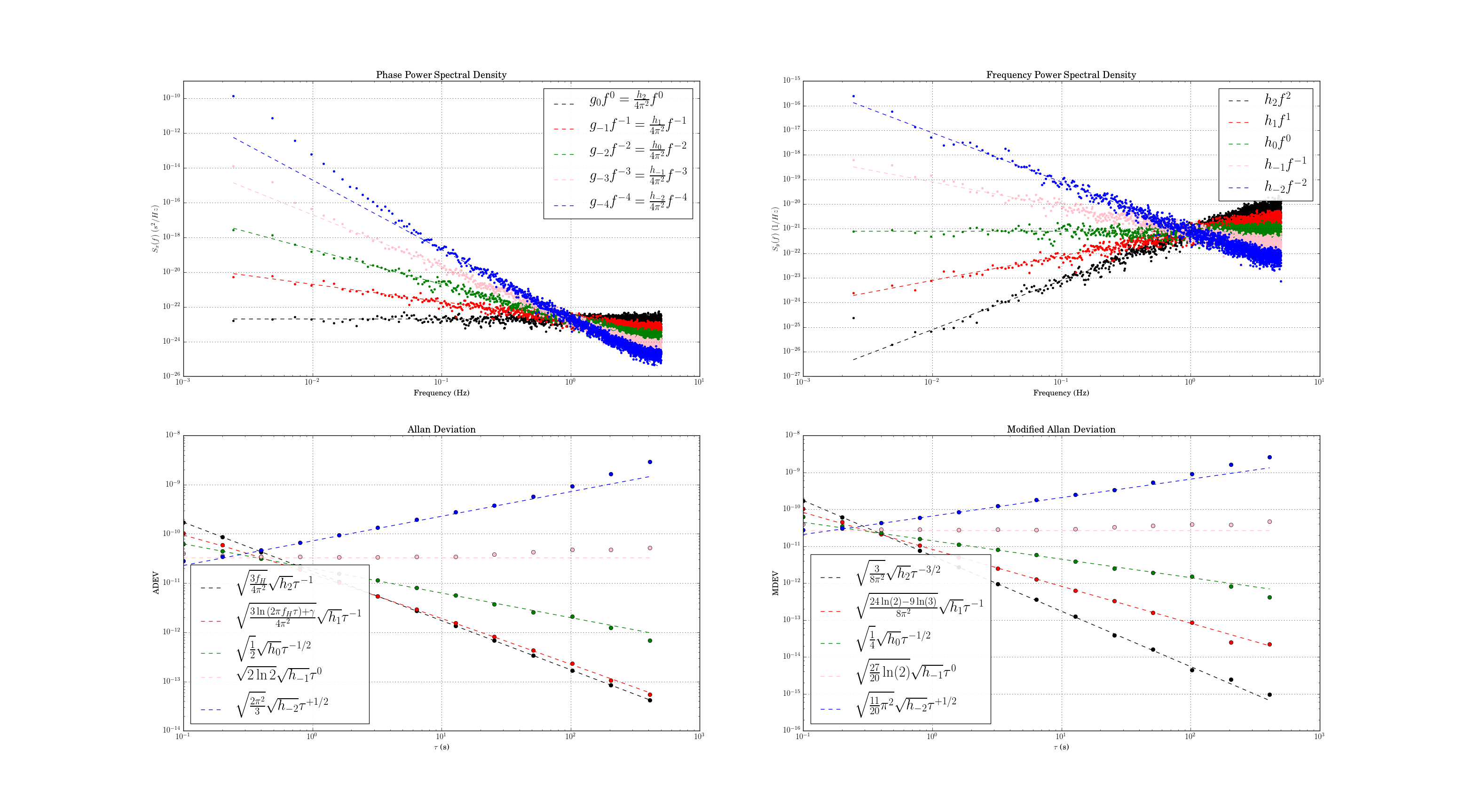
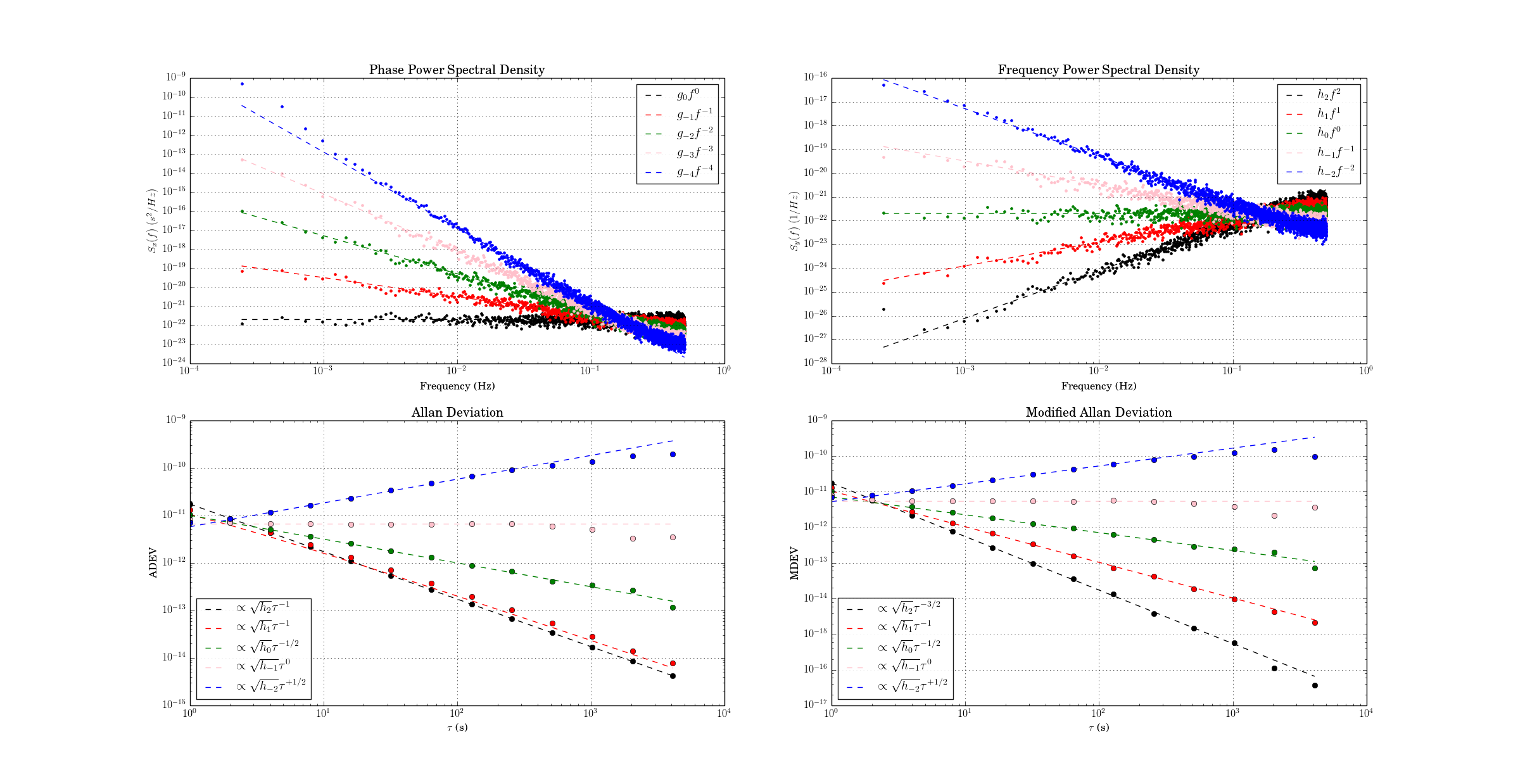
Inspired by discussion on time-nuts, here's a revised noise-colour graph. There are a few updates: The PSDs (both phase and frequency) now cross at 1 Hz (with the relation between phase-PSD and frequency-PSD explicitly stated), and the ADEV/MDEV theoretical lines now include the formula for the pre-factor (the old graph only had 'proportional to' here).
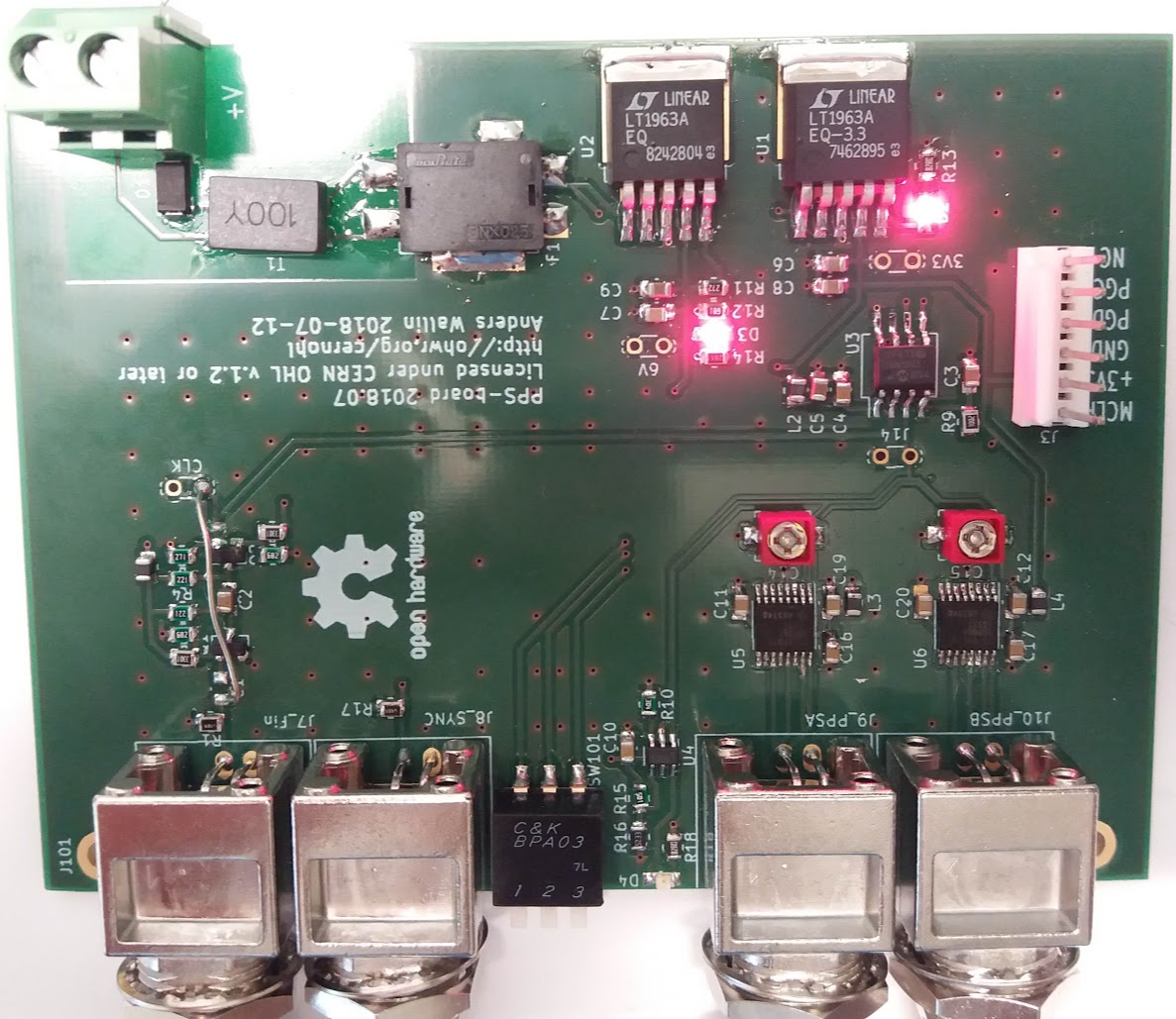
An evolution of my PICDIV-board from 2016. Takes 10MHz input and produces 1PPS (one pulse per second). This one has a TADD-2-mini inspired sine-to-square converter on the input (far left), a PIC12F675 with Tom van Baak's PICDIV-code (right), an ICSP-header for programming, and output-buffers inspired by the pulse distribution amplifier. A 3-position DIP-switch (middle left) allows config-changes, and a blinking LED indicates 1PPS (middle right).
Fixed a few bugs in the first PCB-revision and will order boards for version two soon. Eventually to be published on github/ohwr - stay tuned..
PPS-board 2018 August prototype. Note bypassed sine-to-square circuit on the left.
The usual noise-types studied have phase PSD noise-slopes "b" ranging from 0 to -4 (or even -5 or -6), corresponding to frequency PSD noise-slopes "a" ranging from +2 to -2 (where a=b+2). These 'colors of noise' can be visualized like this:
Four colors of noise. Note frequency PSD slope "a" related to phase PSD slobe "b" by a=b+2. Lower graphs show tau-slopes "mu" for ADEV and MDEV. Data point colors don't match with figures below - sorry.
I've implemented three noise-identification algorithms based on Stable32-documentation and other papers: B1, R(n), and Lag-1 autocorrelation.
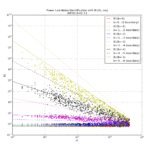
B1 (Howe 2000,Barnes1969) is defined as the ratio of the standard N-sample variance to the (2-sample) Allan variance. From the definitions one can derive an expected B1 ratio of (the length of the time-series is N)
where mu is the tau-exponent of Allan variance for the noise-slope defined by b (or a). Since mu is the same (-2) for both b=0 and b=-1 (red and green data) we can't use B1 to resolve between these noise-types. B1 looks like a good noise-identifier for b=[-2, -3, -4] where it resolves very well between the noise types at short tau, and slightly worse at longer tau.
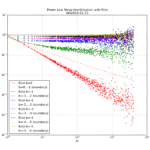
R(n) can be used to resolve between b=0 and b=-1. It is defined as the ratio MVAR/AVAR, and resolves between noise types because MVAR and AVAR have different tau-slopes mu. For b=0 we expect mu(AVAR, b=0) = -2 while mu(MVAR, b=0)=-3 so we get mu(R(n), b=0)=-1 (red data points/line). For b=-1 (green) the usual tables predict the same mu for MVAR and AVAR, but there's a weak log(tau) dependence in the prefactor (see e.g. Dawkins2007, or IEEE1139). For the other noise-types b=[-2,-3,-4] we can't use R(n) because the predicted ratio is one for all these noise types. In contrast to B1 the noise identification using R(n) works best at large tau (and not at all at tau=tau0 or AF=1).
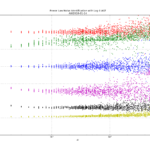
The lag-1 autocorrelation method (Riley, Riley & Greenhall 2004) is the newest, and uses the predicted lag-1 autocorrelation for (WPM b=0, FPM b=-1, WFM b=-2) to identify noise. For other noise types we differentiate the time-series, which adds +2 to the noise slope, until we recognize the noise type.
Here are three figures for ACF, B1, and R(n) noise identification where a simulated time series with known power law noise is first generated using the Kasdin&Walter algorithm, and then we try to identify the noise slope.
Lag-1 ACF noise-identification. Resolves well between all noise types at short and medium tau.
B1 noise-identification. Resolves well between b=-2…-4 at short and medium tau.
R(n) noise identification. Resolves well between b=0, -1 at medium and long tau. Note weak log(tau) dependence for b=-1 (green)
For Lag-1 ACF when we decimate the phase time-series for AF>1 there seems to be a bias to the predicted a (alpha) for b=-1, b=-3, b=-4 which I haven't seen described in the papers or understand that well. Perhaps an aliasing effect(??).
It turns out there's quirky convention of writing out the 40-character SHA1 checksum in 5 groups of 8 hex characters - whith the special undocumented rule that leading zeros are suppressed. This means the SHA1 check fails for some files where we happen to have a leading zero in one of the 8-character groups - unless you happen to know about the undocumented rule...
The output looks like this. "New" is the checksum computed by the program, "Old" is the checksum contained in the published file.
There's also another simple script for authoring a leap-seconds.list file. It might be used for adding an artificial leap-second, generating a leap-seocnds.list file, and testing how different devices react to a leap-second - without having to wait for a real leap-second event.
Following the publication of Circular-T nr. 357 we shall take a look at the RMS error of UTC-UTC(k) in different laboratories across the world. Should we rank the 75 laboratories that have complete UTC-UTC(k) records by RMS error for this month we find the following.
Warning: Past performance is not an indicator of future results.
Fringes from the University of Helsinki FTIR instrument, while aligning it using a HeNe laser. Imaged with af=600mm lens telescope and QHY5 USB-camera.
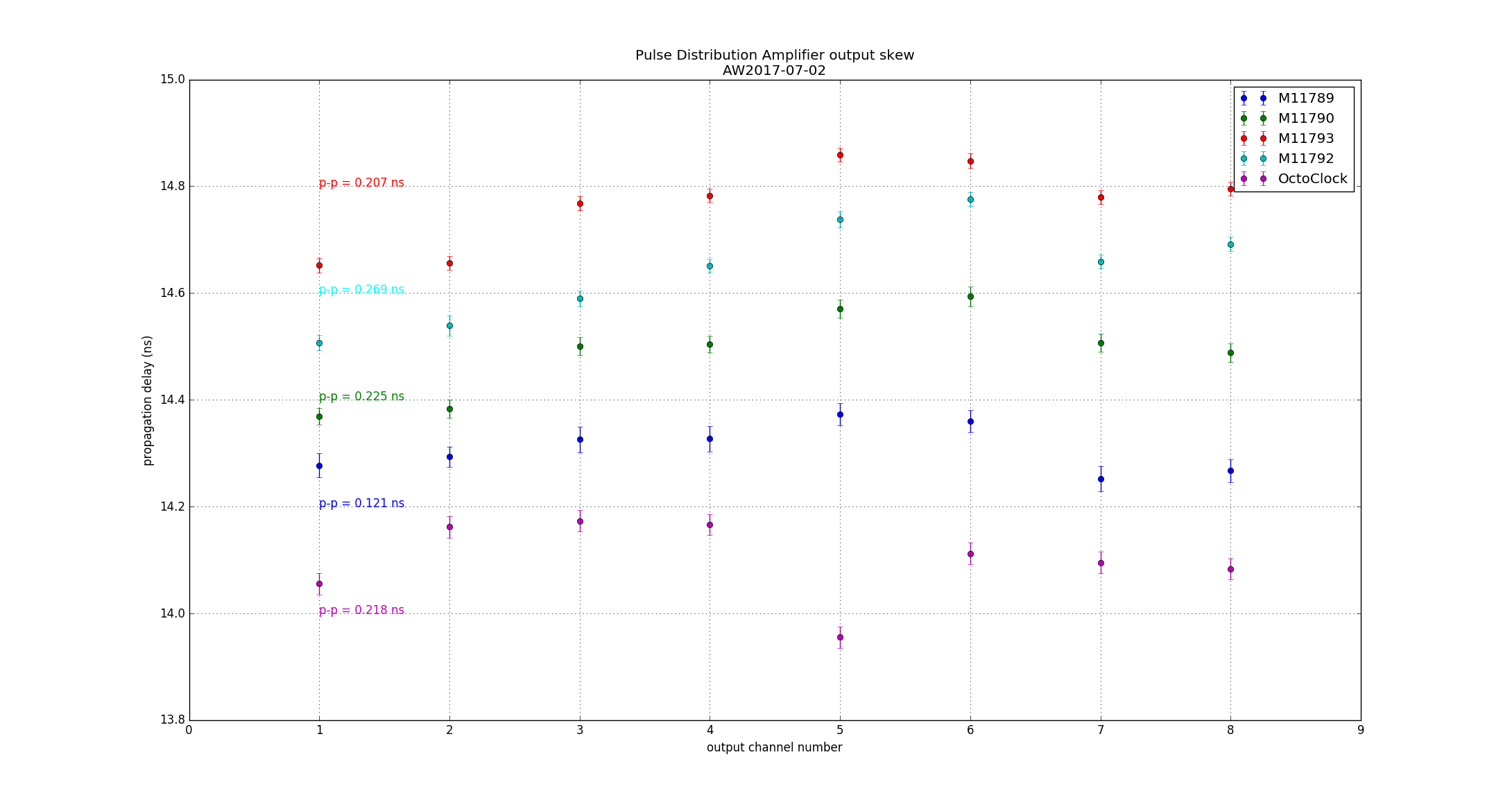
Here is the measured output delay skew from four of my "PDA 2017.01" designs, based on LT1711 comparator driving a 74AC14 schmidt trigger which in turn drives eight 74AC04 output-stages.
Although the PCB was designed with equal-length traces for the output stages it appears that channels 3-4 and 5-6 are consistently late, and some shortening of the traces would improve things. I tried this on one PCB (blue data points) with moderate success.
Measurement setup: 1PPS source to 50-ohm splitter. One output of the splitter drives CH1(start) of a time interval counter (HPAK 53230A), the other output drives the input of the pulse distribution amplifier. Outputs wired to CH2(stop) of the counter and measured for 100 s or more (delay is average of 100 pulses). Counter inputs DC-coupled, 50 Ohms, trigger level 1.0 V.
{kind=link}